
# pa_RobotArm(pa机械臂
## Intro(介绍
####
 A robot arm project that can draw what you want
A robot arm project that can draw what you want#### 一个可以绘制你想绘制的东西的机械臂项目
------
- QQ截图20210628085525.png (832.22 KiB) Viewed 51244 times
在ipad上运行上位机并且在它上面画画

{kind=link}
Draw a cat
画猫猫

{kind=link}
#### The host is written with vue ( The old version using QT)
上位机是用vue写的 (也有旧版本使用的QT+串口协议)
 github: [ActivePeter/RobotArmHost: Host of my robotArm Project using vue and mqtt. The old version uses qt (github.com)](https://github.com/ActivePeter/RobotArmHost)
github: [ActivePeter/RobotArmHost: Host of my robotArm Project using vue and mqtt. The old version uses qt (github.com)](https://github.com/ActivePeter/RobotArmHost) demo: [Vue-ImagePainter (hanbaoaaa.xyz)](https://hanbaoaaa.xyz/apps/RobotArmHost/)
demo: [Vue-ImagePainter (hanbaoaaa.xyz)](https://hanbaoaaa.xyz/apps/RobotArmHost/)draw path on canvas
在canvas 上绘制轨迹

{kind=link}
load picture and generate path
加载图片并生成路径

{kind=link}
##
 Language(语言
Language(语言c/c++ (mcu)
vue (host) (qt: old version)
##
 Model Conversion(模型换算
Model Conversion(模型换算check the model **describe file** and **code**
查看**describe 文件** 和**代码**
[./model_describe.md](./model_describe.md)
[./main/RobotArm/RobotArmApp/RobotArmModel.cpp](./main/RobotArm/RobotArmApp/RobotArmModel.cpp)
## 🛠Developement(开发
1. get **vscode**, install the idf extension in vscode and set up basic **esp32** development environment
获取 **vscode**, 在vscode里安装idf插件 并设置好基础的**esp32**开发环境
2. install the necessary **extensions**, the describe of extensions is in the **Design** part
安装必要的vscode插件, 关于插件的描述在**设计**部分
> Before coding, you should have a **darm robot arm** as that in picture.
>
> Also you should know how to connect **robot arm stepper - stepper driver(a4988) - mcu(esp32)**
>
> **libHelperTree.json** the gpio needed is describe in config tree file
> 在开始写代码之前, 你应该获得一个跟图里一样的dart机械臂
>
> 当然你也应该知道如何链接 **机械臂步进电机 - 步进电机驱动(a4988) - mcu(esp32)**
>
> **libHelperTree.json** 关于gpio的描述可以参考这个文件,当然你也可以自行修改
1. Get my source from github, use my **[Submodule Helper](https://github.com/ActivePeter/SubmoduleHelper-vscode)** or **native git commands** to load submodules.
从github获取我的源码, 使用我的 **[Submodule Helper](https://github.com/ActivePeter/SubmoduleHelper-vscode)** 或**原生 git 指令**来加载子模块.
2. Run build through vscode command pallete
在vscode命令面板执行编译和下载

{kind=link}
## ✏Design(设计
1. It is mainly written in **c++** and well **modularized**.
Abstracting the **driver layer** through my **[paMcuLib](https://github.com/ActivePeter/paMcuLib)**, which makes my MCU project can be easily transferred to other platformsAll the logic of the robot arm is put in class **RobotArmApp**, so this robot arm project is also easy to be transplanted
主要使用**c++**编写,并且做了比较完备的**模块化处理**
通过我的单片机通用库 **[paMcuLib](https://github.com/ActivePeter/paMcuLib)**,对**驱动层**进行了统一的抽象,这使得我的单片机项目可以轻易的被转移到其他平台上。
所有跟机械臂相关的逻辑都放在 **RobotArmApp** 类里。通过创建对象来进行必要函数的调用,所以机械臂项目本身也很容易迁移平台
2. uses my vscode extension [MacroDefineHelper](https://github.com/ActivePeter/MacroDefineHelper-vscode), I can set the platform related things easily(such as gpio)
使用我的vscode插件 [MacroDefineHelper](https://github.com/ActivePeter/MacroDefineHelper-vscode), 我可以**轻易的修改平台相关的宏定义参数**并且生成对应头文件
First I can set up **describe.txt** where I need platform related config macro.
首先我可以在我需要特殊宏定义设置的模块文件夹内创建 **describe.txt**
For example, here I need gpio config for robot arm. I created the describe.txt file to describe the header file and macros in it what I need.
例如, 这里我需要给我的机械臂设置必要的gpio宏,那么我就像下图一样在文件里写入对应的描述,需要的头文件也可以自定义生成名称

{kind=link}
Then using my extension, a **config tree** will be automatically generated. And now I can easily set the macros.
然后使用我的插件,自动生成一个配置树, 然后我可以轻易的修改宏对应的值

{kind=link}
Finally, using my extension, I can generate config header files to the pre-set path
最终,使用我的插件,自动根据配置树生成对应的配置头文件

{kind=link}
3. Using my another extension [Submodule Helper](https://github.com/ActivePeter/SubmoduleHelper-vscode), I can load my paMcuLib modules as git submodules easily. Only need **a json config** file to describe the repositories and paths. Also I can easily switch **used** to load/remove them.
使用我的另一个插件 [Submodule Helper](https://github.com/ActivePeter/SubmoduleHelper-vscode), 我可以轻松的加载和管理我的**paMcuLib 通用库组件**. 只需要一个 **json 配置** 文件来描述仓库和对应的路径。我也可以通过修改**used**轻易的切换**是否使用这些子模块**

{kind=link}
##
 Record
Record- #### 2021/6/20
almost finish. able to draw pictures.
基本完成,可以绘制图片以及轨迹
#### 2020/12/28 已经能够跟上位机通信来更新点序列了!
#### 2020/12/6已经可以顺利的画纵向平面的五角星啦!

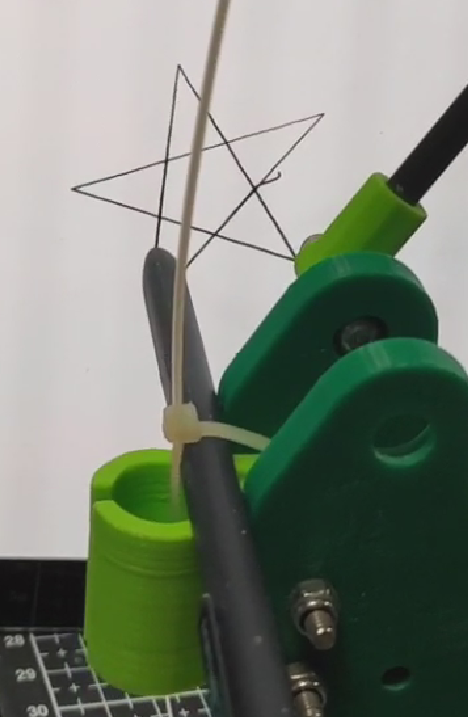{kind=link}