VladTheImpaler wrote: ↑Sun Jul 21, 2019 2:19 pm
@HermannSW where did you buy the fast thing?
22$ with free shipping at aliexpress:
https://www.aliexpress.com/wholesale?Se ... aterpillar
It looks fast, especially if doing U-turn at full speed by just changing direction of one motor but keep its speed:

I don't know why you have this range of lines you are searching in. And I don't know why you take greyscale image. Anyway your correlators seem to do what is needed.
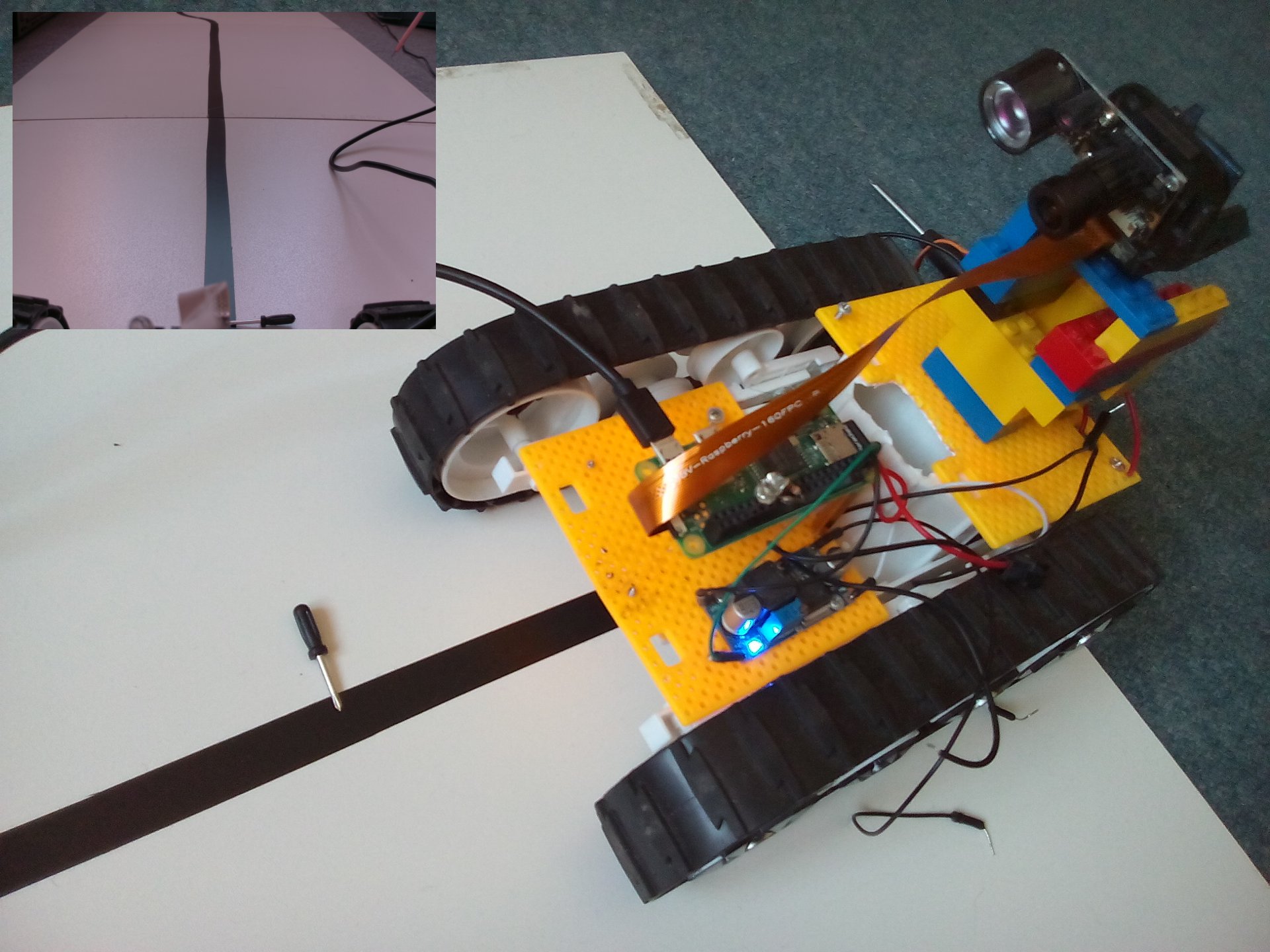
I will use Raspberry camera for this, because they provide for 90fps/180fps 640x480 frames for v1/v2 camera and raspivid[yuv]. And with my high speed raspiraw work I can get 640xH frames at up to 665fps/1007fps. Raspiraw gives raw Bayer data, and I will take lower left green pixel for each 2x2 area, resulting in 320x240 grey8 frame.
I place the camera high above the robot platform in order to see range of 4cm-105cm in front of robot:
I do grey8->b&w conversion of frame first, then the line is big connected component of pixel neighborhood graph that can be found by breadth first search. 1m before robot is "near" future, that will hopefully allow the robot to start high speed U-turns as described in time.
P.S:
Why high framerate captures for robot control?
Because my target platform is not the 2.5m/s caterpillar robot just pointed to, but a T101, with 330rpm motors replaced by 1500rpm motors. With caterpillar wheel diameter of 65mm that robot will do 5m/s (18km/h), and with 90fps a frame will be captured only every 5.6cm, which might not allow fast enough control.


